Emtron Input Expansion to CAN

When purchasing an EIC16M the loom side mating Autosport connector is not included but can be purchased separately.
1.0 Description
The EIC16M is a Mil Spec device designed to increase the Input channel capability of all Emtron ECUs with 16 high resolution analog and/or 4 frequency based inputs. The device is connected via CAN bus and will be automatically detected which will significantly minimalize configuration time. The enclosure is made from billet 6061 aluminium and is waterproof, allowing for use in extreme environments. Installation is made simple through use of a Motorsport proven Deutsch Autosport connector system.
2.0 Specification
Power Supply
- Operating Voltage: 7.0 to 22.0 Volts DC
- Operating Current: 30mA at 14.0V
- Reverse Battery Protection with zero current draw
- Battery Transient/Over Current Protection
Internal
- 64MHz 16-bit Automotive Processor
- Analog Channel Sampling Rate 1000 Hz
Inputs - General
- Analog Inputs
- Range 0.0V to 5.0V, Resolution. 1.22mV 12 Bit
- 1st order 1600Hz low pass filter
- Analog sampling rate of 1000Hz
- Frequency Inputs
- Range 0.5Hz up to 6500.0Hz, Resolution. 0.1Hz
- Magnetic and Hall effect sensor compatible
- Rising Edge Threshold = 1.65V, Falling Edge Threshold = 1.0V
EIC16M – 16 Analog Inputs
- ANV1-12: Analog Inputs 0.0V - 5.00V range.
- Switchable 1k pull-up resistor on ANV9-12 to the 5V Sensor Supply for temperature measurement.
- Input Impedance 100k to ground
- ANV13-16 / Frequency Input 1-4
- Analog Inputs 0.0 – 16.0V Range. Resolution. 3.90mV 12 Bit, suitable for analog inputs and switched inputs.
- Switchable 1k Pullups with blocking diode to 8V Supply
- Input Impedance 50k to ground
- Frequency Range 0.5Hz up to 6500.0Hz, Resolution. 0.1Hz
Outputs
- 5V Sensor Supply. Output current 250mA. Short circuit to ground protected.
Communications
- CAN 2.0B Baud Rate: 250kBaud, 500kBaud or 1Mbaud Auto Detect
- CAN Transmit Rate Adjustable: 50Hz/100Hz/200Hz/500/1000 Hz
Operating Temperature
- Operating Temperature Range: -30 to 100°C (-22 to 212°F)
Physical
EIC16M
- Enclosure Size 52 mm x 74 mm x 18 mm
- 125g
3.0 Installation
Each device has a M4 x 1.5 thread tapped into the base of the enclosure and can be used for mounting. In high vibration applications rubber mounting is recommended.
CAUTION: When mounting the device inside the engine compartment, it should be positioned in cooler areas and away from heat sources such as exhaust manifolds. Any unnecessary radiated heat may affect device performance.
3.1 EIC16M Pinout
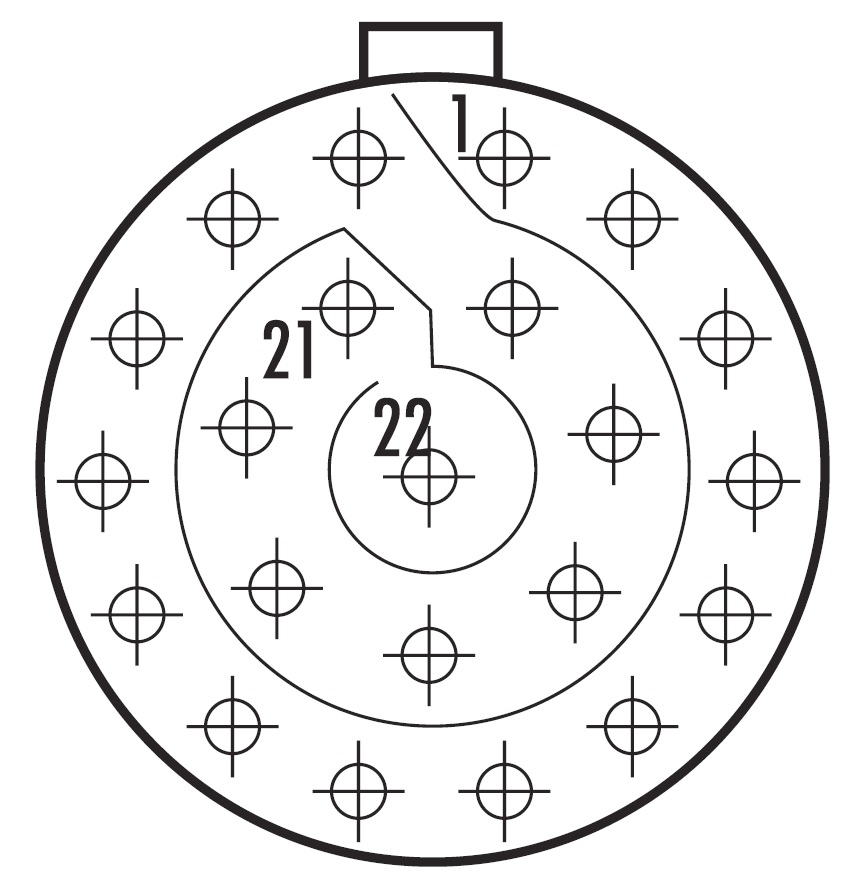
| Mating Connector Loom Side (Deutsch Autosport AS Series) |
|---|
| AS612-35SA (Yellow) |
| Pin | Function | Voltage Range | Pull-Up |
|---|---|---|---|
| 1 | 14 V Supply | ||
| 2 | Ground | ||
| 3 | CAN Hi | ||
| 4 | CAN Lo | ||
| 5 | Analog Voltage 1 | 0.0 – 5.0V | |
| 6 | Analog Voltage 2 | 0.0 – 5.0V | |
| 7 | Analog Voltage 3 | 0.0 – 5.0V | |
| 8 | Analog Voltage 4 | 0.0 – 5.0V | |
| 9 | Analog Voltage 5 | 0.0 – 5.0V | |
| 10 | Analog Voltage 6 | 0.0 – 5.0V | |
| 11 | Analog Voltage 7 | 0.0 – 5.0V | |
| 12 | Analog Voltage 8 | 0.0 – 5.0V | |
| 13 | Analog Voltage 9 | 0.0 – 5.0V | |
| 14 | Analog Voltage 10 | 0.0 – 5.0V | |
| 15 | Analog Voltage 11 | 0.0 – 5.0V | |
| 16 | Analog Voltage 12 | 0.0 – 5.0V | |
| 17 | Analog Voltage 13/Frequency 1 | 0.0 – 16.0V | |
| 18 | Analog Voltage 14/Frequency 2 | 0.0 – 16.0V | |
| 19 | Analog Voltage 15/Frequency 3 | 0.0 – 16.0V | |
| 20 | Analog Voltage 16/Frequency 4 | 0.0 – 16.0V | |
| 21 | 5.0V Sensor Supply | ||
| 22 | 0V Analog Sensor Reference |
Table 3.2. EIC16M Pinout
3.3 CAN Bus
The EIC16M can be connected to the Emtron’s CAN Bus 1 or 2.
All devices on the CAN Bus must be configured to use the same baud rate. For this reason, all Emtron CAN devices will Auto-scan the CAN bus until a successful baud rate has been detected. Once detected this rate will be stored and used at the next power up.
The device will scan 3 different Baud rates at 500ms intervals moving from 1Mbaud -> 500kBaud -> 250k Baud -> 1Mbaud and so on.
NOTE: For this process to function effectively, when new devices are introduced to the CAN bus, they should initially be connected one at a time. This allows each device to sync up to the CAN Bus baud rate and store that setting. This typically takes 3-5 seconds.
The EIC16M leave the factory programmed with individual serial numbers, but all have the same Base CAN Address ID used to transmit data over the Bus. The CAN Base address can be adjusted from the factory setting using the ID Reprogramming Tool. This is required when 2 or more of the same devices are connected to the CAN Bus.
EIC16M.
- Factory CAN Base Address of 705. Transmits data sequentially on the next 5 IDs. Total CAN ID Range is therefore 705 – 710.
3.4 Pullup Resistors
3.41 EIC16M
Temperature Sensors: 5V 1k Pull-ups
Analog Voltage Channels 9 -12 have independent software controlled 5V 1k ohm pullup resistors to the “5V Sensor Supply”. These are suitable for temperature measurement or as ON/OFF inputs by pulling the input to ground through a switch.
The EIC16M has x4 software controlled pullup resistors on ANV9 and ANV12 using a 1k ohm resistor pulled high to the 5V Sensor Supply. These are suitable for temperature sensor inputs.
NOTE: An External 1k resistor can be fitted to other inputs if connecting to a temperature sensor. The 5V Sensor Supply pin should be used as the pullup supply.
Switched Inputs: 8V 1k Pull-ups
The EIC16M has x4 software controlled pullup resistors on ANV13 and ANV16 using a 1k ohm resistor and blocking diode to 8V These are suitable for switched inputs allowing the device to read between 0.0 and 16.0V. In this configuration with the pull ON, the switch can be wired to pull the input to ground.
A summary is shown in Table 3.2.
| Pin | Function | Voltage Input Range | Pull-Up |
|---|---|---|---|
| 13 | Analog Voltage 9 | 0.0 – 5.0V | Yes – 5.0V |
| 14 | Analog Voltage 10 | 0.0 – 5.0V | Yes – 5.0V |
| 15 | Analog Voltage 11 | 0.0 – 5.0V | Yes – 5.0V |
| 16 | Analog Voltage 12 | 0.0 – 5.0V | Yes – 5.0V |
| 17 | Analog Voltage 13/Frequency 1 | 0.0 – 16.0V | Yes – 8.0V |
| 18 | Analog Voltage 14/Frequency 2 | 0.0 – 16.0V | Yes – 8.0V |
| 19 | Analog Voltage 15/Frequency 3 | 0.0 – 16.0V | Yes – 8.0V |
| 20 | Analog Voltage 16/Frequency 4 | 0.0 – 16.0V | Yes – 8.0V |
Table 3.2. EIC16M Inputs pullup resistor summary
NOTE: The blocking diode on the 8V pullup prevents large frequency based signals back-feeding into the supply. If these channels are to be used for temperature measurement this pullup is not suitable. An external 1k resistor will need to be fitted and pulled up to the 5V Sensor Supply.
3.5 Frequency Inputs
The EIC16M has 4x Frequency Inputs which get shared with Analog Input pins as shown with Tables 3.3 and 3.4.
- Range 0.5Hz up to 6500.0Hz
- Resolution. 0.1Hz
- Rising Edge Threshold = 1.65V
- Falling Edge Threshold = 1.00V
- 8V independent software selectable 1k Ohm pullup resistors
- Both Falling or Rising Edges are software selectable.
EIC16M
| Pin | Function |
|---|---|
| 17 | Analog Voltage 13/Frequency 1 |
| 18 | Analog Voltage 14/Frequency 2 |
| 19 | Analog Voltage 15/Frequency 3 |
| 20 | Analog Voltage 16/Frequency 4 |
Table 3.4. EIC16M Frequency Inputs Input Summary.
NOTE: Any EIC configuration changes made from Emtune are immediately sent to the EIC16M device over the CAN Bus and stored automatically by the device.
3.6 Noise Immunity
To minimise signal contamination and maximise noise immunity, the wire pairs shown in Table 3.2 must be twisted. It is recommended to twist the wire pairs at a minimum one twist per 40mm of cable. This is very important and should always be implemented.
| Pair 1 | Pair 2 | |
|---|---|---|
| CAN High | <——-> | CAN Low |
Table 3.3. CAN Hi and Lo wire pairing for twisting
3.7 Sensor Wiring
5V Sensor Supply Pin
This is a 250mA 5V output designed to supply automotive sensors.
Analog Sensor 0V Reference Pin
This pin should be connected directly to the 0V (Ground) pin on any low current analog sensor, for example Pressure or Temperature.
- DO NOT connect the EIC 0V Reference pin directly to the Engine Block or ECU Ground. This is a dedicated and specialised 0V/ground reference for analog sensors.
- DO NOT connect a Sensor 0V/ground pin directly to the Engine Block or Device Ground. Instead this pin should be directly connected to the dedicated EIC 0V Reference pin. See Figure 3.1/3.2.
- DO NOT connect frequency based sensor grounds to the EIC 0V Reference pin; for example, an Ethanol content sensor. Use the main device ground.
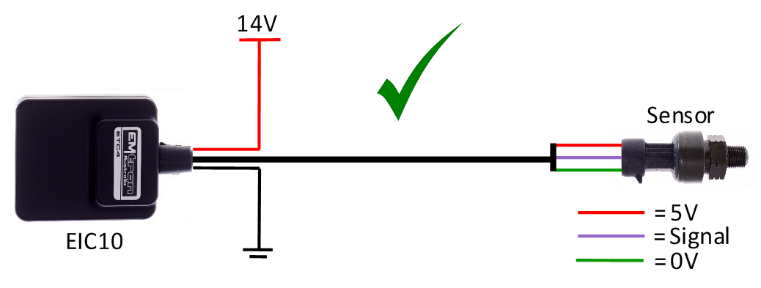
Figure 3.1. Correct MAP Sensor 0V Wiring
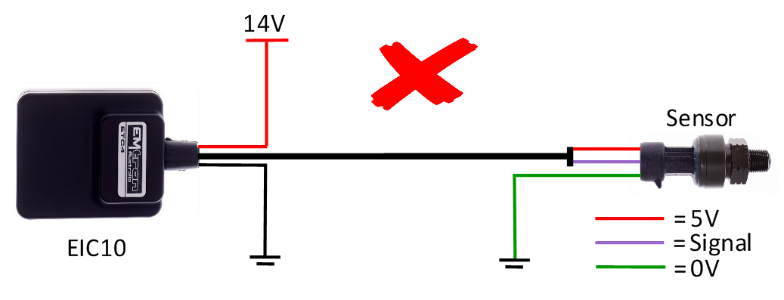
Figure 3.2. Incorrect MAP Sensor 0V Wiring
3.8 CAN Bus Wiring
- CAN Bus High and Low are differential signals, so twisted pair MUST be used. Failing to do so will compromise the entire CAN Bus System.
- In some extreme environments, shielded twisted pair may be required to help with reliability and data integrity.
- The less connectors in any transmission system the better. Unnecessary connectors are almost guaranteed to present an impedance discontinuity and hence may cause reflections and data loss.
- CAN Bus termination must be done correctly by using a 120 ohm 0.25W resistor at each END of the bus system.
- Maximum Stub length to a device from the main Bus is recommended at 0.3m, in accordance with High-Speed ISO 11898 Standard specification. See Figure 3.3.
The EIC16M device does not include an on-board CAN termination resistor, allowing the device to be wired at any position on the Bus. CAN Bus termination must be done correctly by using a 120 ohm 0.25W resistor at each end of the bus system as mentioned above. Figures 3.1 and 3.2 show possible CAN Bus Implementation examples.
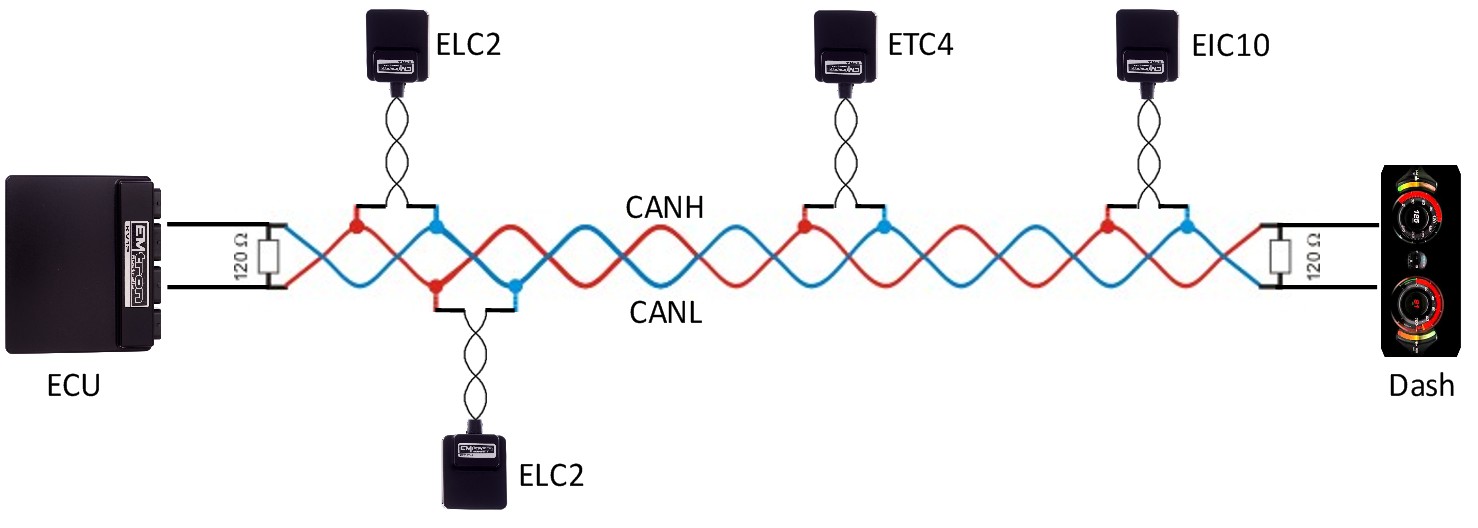
Figure 3.1. CAN Bus Wiring Example. ECU and Dash at each end with 120 Ohm Termination
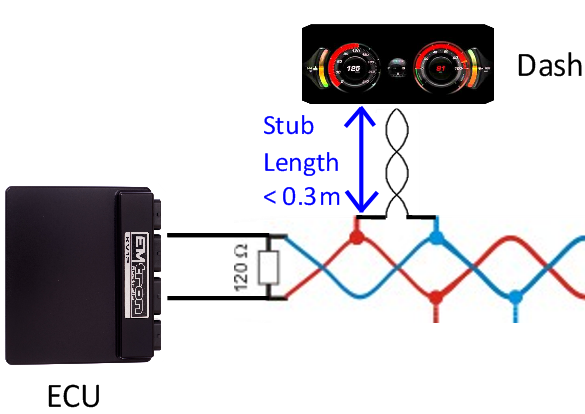
Figure 3.2. CAN Bus Wiring Example. Stub Length less than 0.3m
4.0 EIC Device Configuration
Once the EIC16M is powered and connected to the ECU’s CAN bus, the following steps should be taken to complete the setup. All setup and device monitoring is done using Emtune, so this software needs to be installed and connected to the ECU.
4.1 EIC Single Device Setup
This section outlines the setup procedure for a single device and involves 3 steps:
- Device Detection by the ECU
- ECU CAN Bus configuration
- EIC Live Data Monitoring
4.11 EIC Device Detection
To confirm the EIC device has been detected, connect to the ECU using Emtune. Open the ECU Runtime menu (F3) and select the Communications Tab. Within this tab there will be a list of Emtron CAN devices that the ECU has detected. It will list:
- CAN Device Model
- Device Serial Number
- Device Firmware Version
- Device Hardware Version
- CAN Base Address ID
With a single EIC16M device connected, the data should look as shown in Figure 4.0.
Important:
- At this stage the ECU has only detected the device. It has not been configured to an ECU CAN Channel so the EIC data is not yet available.
- Note the CAN Base Address ID. This is required in the ECU CAN setup. The factory setting is
ID 705for the EIC16M
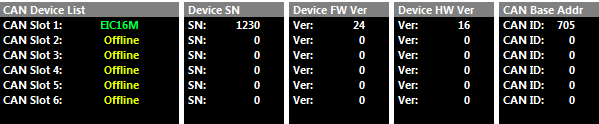 Figure 4.0. EIC16M connected to the CAN Bus
Figure 4.0. EIC16M connected to the CAN Bus
4.12 ECU CAN Configuration for Single Device
Next step is to configure an ECU CAN channel, allowing the ECU to decode the EIC CAN packets.
For this example, CAN 1- Channel 4 has been selected.
- Set “Enable" to 1(ON)”
- Set “CAN Base Address” to the Base Address shown in Figure 4.0 / 4.1. In this example select 705 for EIC16M.
- EIC16M. Set “DATA Set” to 69 (EIC16M 1x Device). See Figure 4.3
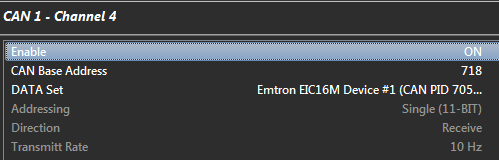
Figure 4.3. EIC16M CAN Configuration
4.13 EIC Data Monitoring for Single Device
To confirm the EIC data is being decoded by the ECU, open the ECU runtime menu (F3) -> Emtron CAN Device Tab. The EIC16M live data can be viewed. See Figure 4.4 and 4.5.
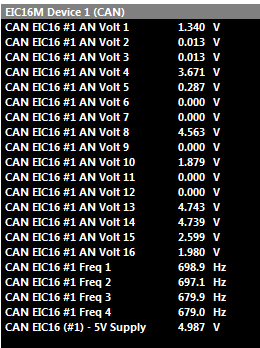
Figure 4.5. EIC16M CAN Live Data– x1 Device
4.2 EIC CAN Base Address ID Reprogramming
The default CAN Base Address can be changed at any time.
This is easily done using Emtune from the Config view -> Communications Menu -> Emtron CAN Devices -> Emtron CAN Device Programming menu. This example shows the CAN Base address being changed from the default 718 to 722.
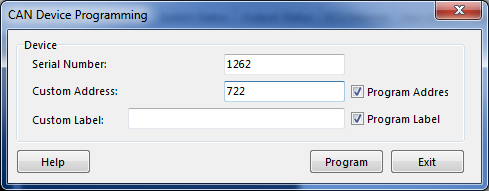
- Enter in Serial Number = 1262
- Enter new Custom Address = 722
- Make sure the “Program Address” checkbox is ticked.
- Select the “Program” button and the new Custom Address ID will be programmed into the device.
To check the device(s) have been programmed correctly with the new Base Address, open the ECU Runtime menu (F3)-> Communications Tab. Each device now has a unique Base Address ID. See Figure 4.8 shows before the program and Figure 4.9 after the program.
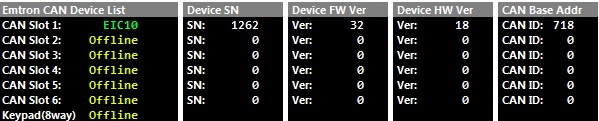
Figure 4.8. EIC CAN ID Default

Figure 4.9. EIC CAN ID Re-programmed
5.0 ECU Channel Configuration
Once the ECU has been configured to receive the EIC4/ECIC16M data, the next step is assigning the data to an ECU channel(s). The example shown in Figure 5.0 shows the following channel assignments:
- Compressor Inlet Pressure assigned to EIC16M channel 1
- Compressor Outlet Pressure assigned to EIC16M channel 2
- Compressor Inlet Temperature assigned to EIC16M channel 9
- Compressor Outlet Temperature assigned to EIC16M channel 10
NOTE: EIC16M pullup control is done through the Config View-> Communications -> Emtron CAN Devices -> Emtron Input to CAN Expansion menu. See Section 6.2 for more information.
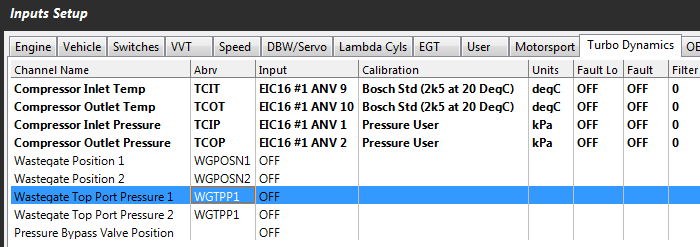
Figure 5.0
6.0 EIC Custom Settings
The EIC16M has custom settings available for:
- Transmit Rates
- Pullup configurations
- Frequency Edge selection
NOTE: When any custom EIC setting is changed, the setting is automatically stored by the EIC device and therefore used on the next power cycle.
CAN Transmit Rates
The data is separated into 3 categories and can be independently adjusted. There are:
- Analog Voltage Channels 1-12 (EIC16M)
- Analog Voltage Channels 13-16 (EIC16M)
- Frequency 1-4
For these setting see Config view-> Communications -> Emtron CAN Devices -> Emtron Input to CAN Expansion. Inside this menu will be an EIC16M menu. The Default value is 200Hz. It can be adjusted to suit the application and available CAN Bandwidth.
There are 4 options available.
- 200 Hz (Default)
- 50 Hz
- 100Hz
- 500Hz
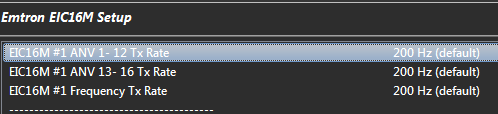
Figure 6.1. EIC16M Transmit Rate setup
Pullup Resistor Control
Section 3.5 previously summarises the Pullup options.
To adjust these setting see Config view-> Communications -> Emtron CAN Devices -> Emtron Input to CAN Expansion
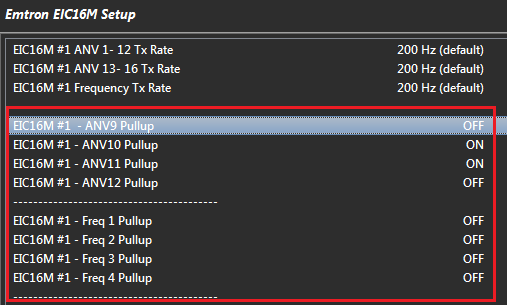
Figure 6.3. EIC16M Pullup Settings
Frequency Channel
Section 3.5 previously summarises the Frequency options. There are 3 frequency modes that can be selected:
- OFF
- Falling Edge
- Rising Edge
The Inputs can accept signals from Magnetic or Hall effect sensors. Magnetic sensors should have the edge selected to Falling. To adjust these setting see Config view-> Communications -> Emtron CAN Devices -> Emtron Input to CAN Expansion menu.
NOTE: The Frequency will not read until the Input Channel is selected to ON (i.e. Falling or Rising edge).
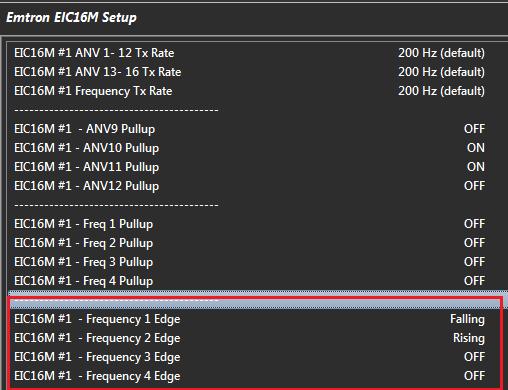
Figure 6.5. EIC16M Frequency Input Settings
7.0 Ordering Information
| Product | Part Number |
|---|---|
| Emtron EIC16M | 593-1613 |
Appendices
Appendix 1. CAN Bus Data Packaging
This section outlines the CAN Protocol used to communicate with the EIC device(s). If the device is connected to an Emtron ECU, the CAN Bus packet is automatically decoded when correct CAN Dataset is selected and no additional setup is required. For more information refer to Section 4.0.
This section provides more detailed information on the CAN ID data structure and requires an understanding of both CAN protocols and data packaging.
Baud Rate
The EIC will Auto-scan the CAN bus until a successful baud rate has been detected. Once detected this rate will be stored by the device and used at the next power up.
The device will scan 3 different Baud rates at 500ms intervals moving from 1Mbaud -> 500kBaud -> 250k Baud -> 1Mbaud and so on.
EIC16M CAN Data Format
| ID | 705 /0x2C1 (Default) |
|---|---|
| Data | Voltage 3dp |
| ID Type | Standard 11-bit identifier |
| Direction | Transmit from Device |
| Length | 8 bytes |
| Tx Rate | Adjustable (50/100/200/500 Hz) |
| CAN ID | Name | Start bit | Length (bits) | Byte Order | Data Type |
|---|---|---|---|---|---|
| 705/0x2C1 | AN Voltage 1 | 0 | 16 | Little Endian | Unsigned |
| AN Voltage 2 | 16 | 16 | Little Endian | Unsigned | |
| AN Voltage 3 | 32 | 16 | Little Endian | Unsigned | |
| AN Voltage 4 | 48 | 16 | Little Endian | Unsigned | |
| 705/0x2C1 | AN Voltage 1 | 0.001 | 0 | V | 0.0 V |
| AN Voltage 2 | 0.001 | 0 | V | 0.0 V | |
| AN Voltage 3 | 0.001 | 0 | V | 0.0 V | |
| AN Voltage 4 | 0.001 | 0 | V | 0.0 V |
| ID | 706 /0x2C2 (Default) |
|---|---|
| Data | Voltage 3dp |
| ID Type | Standard 11-bit identifier |
| Direction | Transmit from Device |
| Length | 8 bytes |
| Tx Rate | Adjustable (50/100/200/500 Hz) |
| CAN ID | Name | Start bit | Length (bits) | Byte Order | Data Type |
|---|---|---|---|---|---|
| 706/0x2C2 | AN Voltage 5 | 0 | 16 | Little Endian | Unsigned |
| AN Voltage 6 | 16 | 16 | Little Endian | Unsigned | |
| AN Voltage 7 | 32 | 16 | Little Endian | Unsigned | |
| AN Voltage 8 | 48 | 16 | Little Endian | Unsigned | |
| 706/0x2C2 | AN Voltage 5 | 0.001 | 0 | V | 0.0 V |
| AN Voltage 6 | 0.001 | 0 | V | 0.0 V | |
| AN Voltage 7 | 0.001 | 0 | V | 0.0 V | |
| AN Voltage 8 | 0.001 | 0 | V | 0.0 V |
| ID | 707 /0x2C3 (Default) |
|---|---|
| Data | Voltage 3dp |
| ID Type | Standard 11-bit identifier |
| Direction | Transmit from Device |
| Length | 8 bytes |
| Tx Rate | Adjustable (50/100/200/500 Hz) |
| CAN ID | Name | Start bit | Length (bits) | Byte Order | Data Type |
|---|---|---|---|---|---|
| 707/0x2C3 | AN Voltage 9 | 0 | 16 | Little Endian | Unsigned |
| AN Voltage 10 | 16 | 16 | Little Endian | Unsigned | |
| AN Voltage 11 | 32 | 16 | Little Endian | Unsigned | |
| AN Voltage 12 | 48 | 16 | Little Endian | Unsigned | |
| 707/0x2C3 | AN Voltage 9 | 0.001 | 0 | V | 0.0 V |
| AN Voltage 10 | 0.001 | 0 | V | 0.0 V | |
| AN Voltage 11 | 0.001 | 0 | V | 0.0 V | |
| AN Voltage 12 | 0.001 | 0 | V | 0.0 V |
| ID | 708 /0x2C4 (Default) |
|---|---|
| Data | Voltage 3dp |
| ID Type | Standard 11-bit identifier |
| Direction | Transmit from Device |
| Length | 8 bytes |
| Tx Rate | Adjustable (50/100/200/500 Hz) |
| CAN ID | Name | Start bit | Length (bits) | Byte Order | Data Type |
|---|---|---|---|---|---|
| 708/0x2C4 | AN Voltage 13 | 0 | 16 | Little Endian | Unsigned |
| AN Voltage 14 | 16 | 16 | Little Endian | Unsigned | |
| AN Voltage 15 | 32 | 16 | Little Endian | Unsigned | |
| AN Voltage 16 | 48 | 16 | Little Endian | Unsigned | |
| 708/0x2C4 | AN Voltage 13 | 0.001 | 0 | V | 0.0 V |
| AN Voltage 14 | 0.001 | 0 | V | 0.0 V | |
| AN Voltage 15 | 0.001 | 0 | V | 0.0 V | |
| AN Voltage 16 | 0.001 | 0 | V | 0.0 V |
| ID | 709 /0x2C5 (Default) |
|---|---|
| Data | Frequency 1dp |
| ID Type | Standard 11-bit identifier |
| Direction | Transmit from Device |
| Length | 8 bytes |
| Tx Rate | Adjustable (50/100/200/500 Hz) |
| CAN ID | Name | Start bit | Length (bits) | Byte Order | Data Type |
|---|---|---|---|---|---|
| 709/0x2C5 | Frequency 1 | 0 | 16 | Little Endian | Unsigned |
| Frequency 2 | 16 | 16 | Little Endian | Unsigned | |
| Frequency 3 | 32 | 16 | Little Endian | Unsigned | |
| Frequency 4 | 48 | 16 | Little Endian | Unsigned | |
| 709/0x2C5 | Frequency 1 | 0.1 | 0 | Hz | 0 |
| Frequency 2 | 0.1 | 0 | Hz | 0 | |
| Frequency 3 | 0.1 | 0 | Hz | 0 | |
| Frequency 4 | 0.1 | 0 | Hz | 0 |
| ID | 710 /0x2C6 (Default) |
|---|---|
| Data | Sensor Supply |
| ID Type | Standard 11-bit identifier |
| Direction | Transmit from Device |
| Length | 2 bytes |
| Tx Rate | 20Hz (fixed) |
| CAN ID | Name | Start bit | Length (bits) | Byte Order | Data Type |
|---|---|---|---|---|---|
| 710/0x2C6 | 5V Analog Supply | 0 | 16 | Little Endian | Unsigned |
| 710/0x2C6 | 5V Analog Supply | 0.001 | 0 | V | 0.0 V |
Appendix B. Magneto-Resistive Sensors
Magneto-resistive (MR) sensors are commonly used in driver assistance systems such as ABS, TCS and ESP to measure wheel speed, the frequency being proportional to the rotational speed of the wheel. These sensors detect a magnetic field and because there is no electrical contact the sensor can operate across a relatively large air gap. The amplitude of the output signal does not depend on speed.
These are active sensors which means they become “active” when a power supply is connected to it and a digital output waveform is then generated. However, the signal does not switch to ground like a conventional Hall sensor. Instead the signal swings between a high and low voltage, with the swing voltage dependant on the current passing through the sensor, i.e. the value of the pullup or pulldown current limiting resistor. Typical currents required to make to the sensor operate are 4 – 8mA.
Two important checks must be completed.
- The polarity of the sensor must be correct.
- The pullup/pulldown resistor might need adjustment to ensure it the digital signal swings within the correct levels. For the EIC16 this is 1.0V low and 1.8V high.
Sensor Polarity
The sensor polarity can be determined by measuring the diode voltage drop across the sensor, (sensor resistance cannot be used) using a Multimeter. The direction with the highest voltage drop is the correct polarity. See Table 6.0 as an example. Pin 1 should be connected to the pullup resistor and pin 2 should be connected the ground.
| Diode Voltage Drop | Pin 1 | Pin 2 | Notes | |
|---|---|---|---|---|
| 1.781 V | Positive | Negative | Correct Polarity | |
| 0.637 V | Negative | Positive | Incorrect Polarity |
Table 6.0
Device Connection
An MT sensor can be connected directly to an Emtron ECU and the internal Scope function can be used to view the signal. Once you have the signal image, config the pullup resistor and correctly set the arming threshold.
Due to the variation in sensor outputs the EIC Device requires an interface device to condition the signal to match the factory EIC thresholds (1.0V low and 1.8V high).
Sensor Supply and Wiring
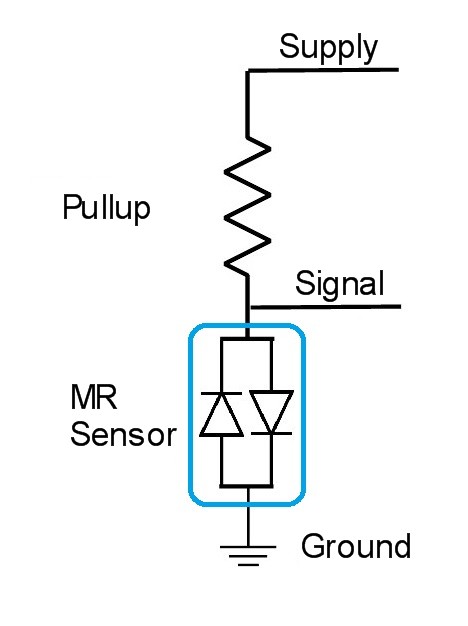
The sensor is powered through a pullup resistor. The minimum supply voltage is 8V, ideally a regulated supply should be used to ensure consistent readings. Figure 6.0 illustrates how the sensor should be wired.
NOTE: If the pullup resistor is too big there will be insufficient current to make the output switch. Typical Pullup resistor range is 330 Ohms to 1000 Ohms.
NOTE: The Low and High outputs levels will vary with different sensors, so for signal integrity each sensor output should be checked using an oscilloscope. Table 6.1 show some typical results from a Toyota Sensor
Figure 6.0. Sensor Wiring
| Supply | Pullup Resistance | Low Output | High Output | Switching Range | Comments |
|---|---|---|---|---|---|
| 5V | 330 Ohms | 5.2V | 5.2V | 0.0V | Insufficient Current |
| 8V | 330 Ohms | 3.6V | 5.9V | 2.3V | (see Figure 6.1) |
| 12V | 330 Ohms | 7.6V | 9.9V | 2.3V | |
| 8V | 470 Ohms | 5.25V | 5.25V | 0.0V | Insufficient Current |
| 12V | 470 Ohms | 6.3V | 9.45V | 3.15V |
Table 6.1
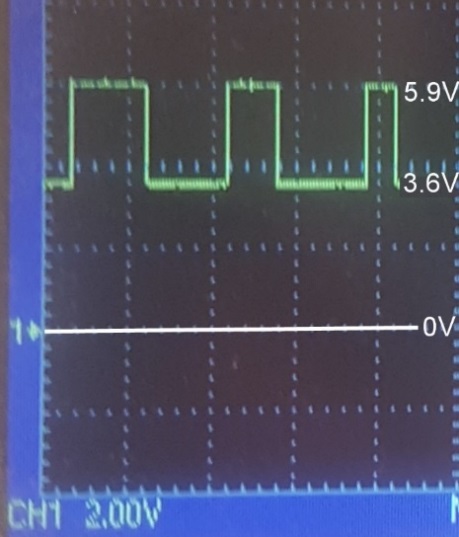
Figure 6.1 shows a scope trace of a MR Sensor with 330R pullup supplied at 8V. The High Output level is 5.9V and the Low Output Level is 3.6V.
Figure 6.1. Scope trace of MR Sensor.