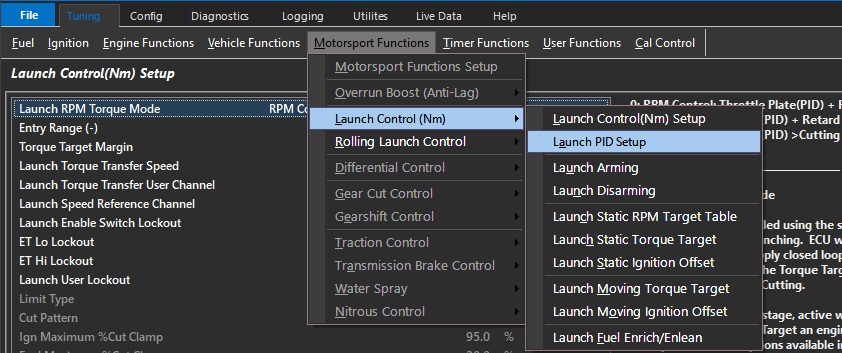
Launch PID Setup
Launch PID Setup
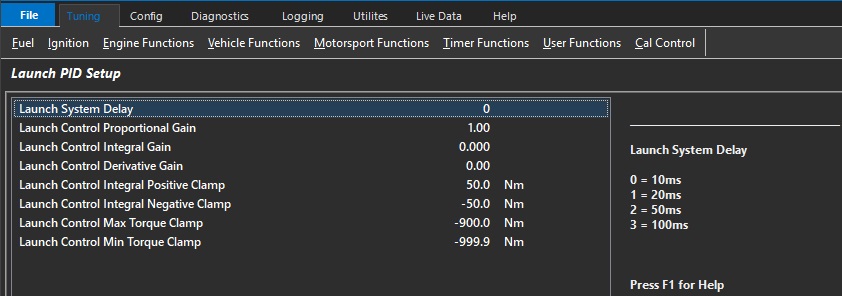
Launch System Delay
This is the time delay for the system to react to changes. It is used to help integral gain windup. Typical setting is 100ms.
0 = 10ms
1 = 20ms
2 = 50ms
3 = 100ms
Launch Control Proportional Gain
Proportional gain controls how aggressive instantaneous correction must be.
Example:
A value of 1.00 will output +/- 10Nm
for every 100 RPM of Target error.
Launch Control Integral Gain
Integral gain controls how much adaptive correction is needed.
Launch Control Derivative Gain
Derivative gain controls predictive correction where gain is based on the rate of change of error.
Launch Control Integral Positive Clamp
Positive clamp value for Integral Gain
Units - NM
Launch Control Integral Negative Clamp
Negative clamp value for Integral Gain
Units - NM
Launch Control Max Torque Clamp
Positive clamp value for Torque Launch Control
Units - NM
Launch Control Min Torque Clamp
Minimum clamp value for Torque Launch Control
Units - NM